
Unsupervised Segmentation of Indoor 3D Point Cloud: Application to Object-based Classification
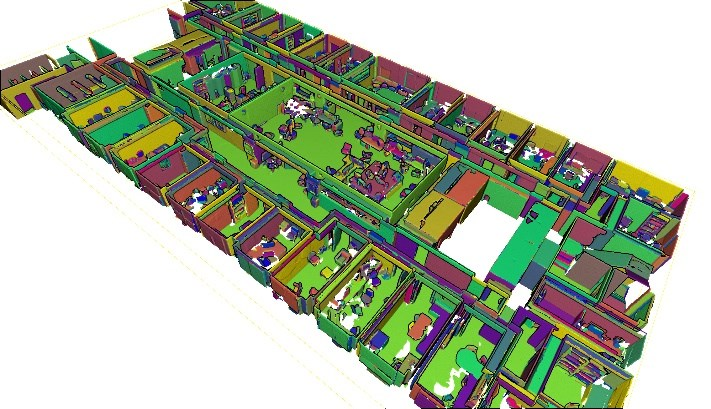
Point cloud data of indoor scenes is primarily composed of planar-dominant elements. Automatic shape segmentation is thus valuable to avoid labour intensive labelling. This paper provides a fully unsupervised region growing segmentation approach for efficient clustering of massive 3D point clouds. Our contribution targets a low-level grouping beneficial to object-based classification. We argue that the use of relevant segments for object-based classification has the potential to perform better in terms of recognition accuracy, computing time and lowers the manual labelling time needed. However, fully unsupervised approaches are rare due to a lack of proper generalisation of user-defined parameters. We propose a self-learning heuristic process to define optimal parameters, and we validate our method on a large and richly annotated dataset (S3DIS) yielding 88.1% average F1-score for object-based classification. It permits to automatically segment indoor point clouds with no prior knowledge at commercially viable performance and is the foundation for efficient indoor 3D modelling in cluttered point clouds.
@Article{poux2020b,
author = {Poux, F. and Mattes, C. and Kobbelt, L.},
title = {UNSUPERVISED SEGMENTATION OF INDOOR 3D POINT CLOUD: APPLICATION TO OBJECT-BASED CLASSIFICATION},
journal = {ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences},
volume = {XLIV-4/W1-2020},
year = {2020},
pages = {111--118},
url = {https://www.int-arch-photogramm-remote-sens-spatial-inf-sci.net/XLIV-4-W1-2020/111/2020/},
doi = {10.5194/isprs-archives-XLIV-4-W1-2020-111-2020}
}
