
Publications
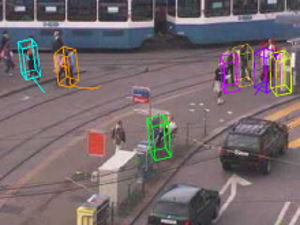
Dynamic 3D Scene Analysis from a Moving Vehicle

In this paper, we present a system that integrates fully automatic scene geometry estimation, 2D object detection, 3D localization, trajectory estimation, and tracking for dynamic scene interpretation from a moving vehicle. Our sole input are two video streams from a calibrated stereo rig on top of a car. From these streams, we estimate Structurefrom-Motion (SfM) and scene geometry in real-time. In parallel, we perform multi-view/multi-category object recognition to detect cars and pedestrians in both camera images. Using the SfM self-localization, 2D object detections are converted to 3D observations, which are accumulated in a world coordinate frame. A subsequent tracking module analyzes the resulting 3D observations to find physically plausible spacetime trajectories. Finally, a global optimization criterion takes object-object interactions into account to arrive at accurate 3D localization and trajectory estimates for both cars and pedestrians. We demonstrate the performance of our integrated system on challenging real-world data showing car passages through crowded city areas.
Coupled Detection and Trajectory Estimation for Multi-Object Tracking
We present a novel approach for multi-object tracking which considers object detection and spacetime trajectory estimation as a coupled optimization problem. It is formulated in a hypothesis selection framework and builds upon a state-of-the-art pedestrian detector. At each time instant, it searches for the globally optimal set of spacetime trajectories which provides the best explanation for the current image and for all evidence collected so far, while satisfying the constraints that no two objects may occupy the same physical space, nor explain the same image pixels at any point in time. Successful trajectory hypotheses are fed back to guide object detection in future frames. The optimization procedure is kept efficient through incremental computation and conservative hypothesis pruning. The resulting approach can initialize automatically and track a large and varying number of persons over long periods and through complex scenes with clutter, occlusions, and large-scale background changes. Also, the global optimization framework allows our system to recover from mismatches and temporarily lost tracks. We demonstrate the feasibility of the proposed approach on several challenging video sequences.
Fast 3D Scanning with Automatic Motion Compensation

We present a novel 3D scanning system combining stereo and active illumination based on phase-shift for robust and accurate scene reconstruction. Stereo overcomes the traditional phase discontinuity problem and allows for the reconstruction of complex scenes containing multiple objects. Due to the sequential recording of three patterns, motion will introduce artifacts in the reconstruction. We develop a closed-form expression for the motion error in order to apply motion compensation on a pixel level. The resulting scanning system can capture accurate depth maps of complex dynamic scenes at 17 fps and can cope with both rigid and deformable objects.
Efficient Mining of Frequent and Distinctive Feature Configurations
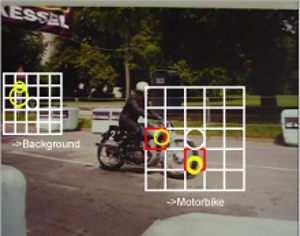
We present a novel approach to automatically find spatial configurations of local features occurring frequently on instances of a given object class, and rarely on the background. The approach is based on computationally effi- cient data mining techniques and can find frequent con- figurations among tens of thousands of candidates within seconds. Based on the mined configurations we develop a method to select features which have high probability of lying on previously unseen instances of the object class. The technique is meant as an intermediate processing layer to filter the large amount of clutter features returned by lowlevel feature extraction, and hence to facilitate the tasks of higher-level processing stages such as object detection.
Depth and Appearance for Mobile Scene Analysis
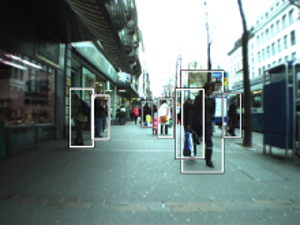
In this paper, we address the challenging problem of simultaneous pedestrian detection and ground-plane estimation from video while walking through a busy pedestrian zone. Our proposed system integrates robust stereo depth cues, ground-plane estimation, and appearance-based object detection in a principled fashion using a graphical model. Object-object occlusions lead to complex interactions in this model that make an exact solution computationally intractable. We therefore propose a novel iterative approach that first infers scene geometry using Belief Propagation and then resolves interactions between objects using a global optimization procedure. This approach leads to a robust solution in few iterations, while allowing object detection to benefit from geometry estimation and vice versa. We quantitatively evaluate the performance of our proposed approach on several challenging test sequences showing strolls through busy shopping streets. Comparisons to various baseline systems show that it outperforms both a system using no scene geometry and one just relying on Structure-from-Motion without dense stereo
@InProceedings{eth_biwi_00498,
author = {A. Ess and B. Leibe and L. Van Gool},
title = {Depth and Appearance for Mobile Scene Analysis},
booktitle = {International Conference on Computer Vision (ICCV'07)},
year = {2007},
month = {October},
keywords = {}
}
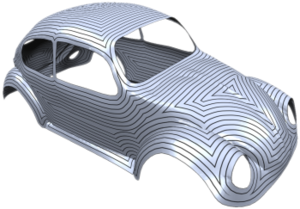
On-the-fly Curve-skeleton Computation for 3D Shapes
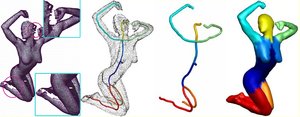
The curve-skeleton of a 3D object is an abstract geometrical and topological representation of its 3D shape. It maps the spatial relation of geometrically meaningful parts to a graph structure. Each arc of this graph represents a part of the object with roughly constant diameter or thickness, and approximates its centerline. This makes the curve-skeleton suitable to describe and handle articulated objects such as characters for animation. We present an algorithm to extract such a skeleton on-the-fly, both from point clouds and polygonal meshes. The algorithm is based on a deformable model evolution that captures the object’s volumetric shape. The deformable model involves multiple competing fronts which evolve inside the object in a coarse-to-fine manner. We first track these fronts’ centers, and then merge and filter the resulting arcs to obtain a curve-skeleton of the object. The process inherits the robustness of the reconstruction technique, being able to cope with noisy input, intricate geometry and complex topology. It creates a natural segmentation of the object and computes a center curve for each segment while maintaining a full correspondence between the skeleton and the boundary of the object.
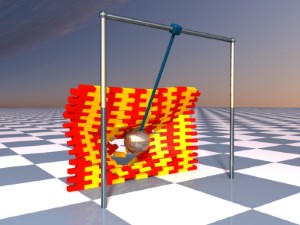
Impulse-based dynamic simulation in linear time

This paper describes an impulse-based dynamic simulation method for articulated bodies which has a linear time complexity. Existing linear-time methods are either based on a reduced-coordinate formulation or on Lagrange multipliers. The impulse-based simulation has advantages over these well-known methods. Unlike reduced-coordinate methods, it handles nonholonomic constraints like velocity-dependent ones and is very easy to implement. In contrast to Lagrange multiplier methods the impulse-based approach has no drift problem and an additional stabilisation is not necessary. The presented method computes a simulation step in O(n) time for acyclic multi-body systems containing equality constraints. Closed kinematic chains can be handled by dividing the model into different acyclic parts. Each of these parts is solved independently from each other. The dependencies between the single parts are solved by an iterative method. In the same way inequality constraints can be integrated in the simulation process in order to handle collisions and permanent contacts with dynamic and static friction.
@article{Bender07,
author = {Jan Bender},
title = {Impulse-based dynamic simulation in linear time},
journal = {Computer Animation and Virtual Worlds},
volume = {18},
number = {4-5},
year = {2007},
issn = {1546-4261},
pages = {225--233},
doi = {http://dx.doi.org/10.1002/cav.v18:4/5},
publisher = {John Wiley and Sons Ltd.},
address = {Chichester, UK, UK},
}
Depth-from-Recognition: Inferring Meta-data through Cognitive Feedback

Thanks to recent progress in category-level object recognition, we have now come to a point where these techniques have gained sufficient maturity and accuracy to succesfully feed back their output to other processes. This is what we refer to as cognitive feedback. In this paper, we study one particular form of cognitive feedback, where the ability to recognize objects of a given category is exploited to infer meta-data such as depth cues, 3D points, or object decomposition in images of previously unseen object instances. Our approach builds on the Implicit Shape Model of Leibe and Schiele, and extends it to transfer annotations from training images to test images. Experimental results validate the viability of our approach.
GPU-Based Multiresolution Deformation Using Approximate Normal Field Reconstruction
Multiresolution shape editing performs global deformations while preserving fine surface details by modifying a smooth base surface and reconstructing the modified detailed surface as a normal displacement from it. Since two non-trivial operators (deformation and reconstruction) are involved, the computational complexity can become too high for real-time deformations of complex models. We present an efficient technique for evaluating multiresolution deformations of high-resolution triangle meshes directly on the GPU. By precomputing the deformation functions as well as their gradient information we can map both the deformation and the reconstruction operator to the GPU, which enables us to reconstruct the deformed positions and sufficiently close approximations of the normal vectors in the vertex shader in a single rendering pass. This allows us to render dynamically deforming 3D models several times faster than on the CPU. We demonstrate the application of our technique to two modern multiresolution approaches: one based on (irregular) displaced subdivision surfaces and the other one on volumetric space deformation using radial basis functions.
Impulsbasierte Dynamiksimulation von Mehrkörpersystemen in der virtuellen Realität
Die dynamische Simulation gewinnt im Bereich der virtuellen Realität immer mehr an Bedeutung. Sie ist ein wichtiges Hilfsmittel, um den Grad der Immersion des Benutzers in eine virtuelle Welt zu erhöhen. In diesem Anwendungsbereich ist die Geschwindigkeit des verwendeten Simulationsverfahrens entscheidend. Weitere Anforderungen an das Verfahren sind unter anderem Genauigkeit, Stabilität und eine einfache Implementierung.
In dieser Arbeit wird ein neues impulsbasiertes Verfahren für die dynamische Simulation von Mehrkörpersystemen vorgestellt. Dieses erfüllt, im Gegensatz zu klassischen Verfahren, alle Anforderungen der virtuellen Realität. Das vorgestellte Verfahren arbeitet ausschließlich mit Impulsen, um mechanische Gelenke, Kollisionen und bleibende Kontakte mit Reibung zu simulieren.
@PhdThesis{Bender07,
author = {Jan Bender},
title = {Impulsbasierte Dynamiksimulation von Mehrk{\"o}rpersystemen in der virtuellen Realit{\"a}t},
school = {University of Karlsruhe, Germany},
year = {2007},
month = feb,
}
Accurate Computation of Geodesic Distance Fields for Polygonal Curves on Triangle Meshes
We present an algorithm for the efficient and accurate computation of geodesic distance fields on triangle meshes. We generalize the algorithm originally proposed by Surazhsky et al. . While the original algorithm is able to compute geodesic distances to isolated points on the mesh only, our generalization can handle arbitrary, possibly open, polygons on the mesh to define the zero set of the distance field. Our extensions integrate naturally into the base algorithm and consequently maintain all its nice properties. For most geometry processing algorithms, the exact geodesic distance information is sampled at the mesh vertices and the resulting piecewise linear interpolant is used as an approximation to the true distance field. The quality of this approximation strongly depends on the structure of the mesh and the location of the medial axis of the distance fild. Hence our second contribution is a simple adaptive refinement scheme, which inserts new vertices at critical locations on the mesh such that the final piecewise linear interpolant is guaranteed to be a faithful approximation to the true geodesic distance field.
A Surface-Growing Approach to Multi-View Stereo Reconstruction

We present a new approach to reconstruct the shape of a 3D object or scene from a set of calibrated images. The central idea of our method is to combine the topological flexibility of a point-based geometry representation with the robust reconstruction properties of scene-aligned planar primitives. This can be achieved by approximating the shape with a set of surface elements (surfels) in the form of planar disks which are independently fitted such that their footprint in the input images matches. Instead of using an artificial energy functional to promote the smoothness of the recovered surface during fitting, we use the smoothness assumption only to initialize planar primitives and to check the feasibility of the fitting result. After an initial disk has been found, the recovered region is iteratively expanded by growing further disks in tangent direction. The expansion stops when a disk rotates by more than a given threshold during the fitting step. A global sampling strategy guarantees that eventually the whole surface is covered. Our technique does not depend on a shape prior or silhouette information for the initialization and it can automatically and simultaneously recover the geometry, topology, and visibility information which makes it superior to other state-of-the-art techniques. We demonstrate with several high-quality reconstruction examples that our algorithm performs highly robustly and is tolerant to a wide range of image capture modalities.
Fast Interactive Region of Interest Selection for Volume Visualization
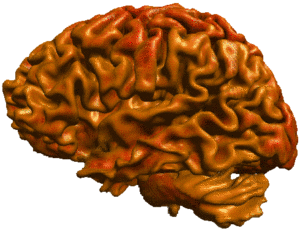
We describe a new method to support the segmentation of a volumetric MRI- or CT-dataset such that only the components selected by the user are displayed by a volume renderer for visual inspection. The goal is to combine the advantages of direct volume rendering (high efficiency and semi-transparent display of internal structures) and indirect volume rendering (well defined surface geometry and topology). Our approach is based on a re-labeling of the input volume's set of isosurfaces which allows the user to peel off the outer layers and to distinguish unconnected voxel components which happen to have the same voxel values. For memory and time efficiency, isosurfaces are never generated explicitly. Instead a second voxel grid is computed which stores a discretization of the new isosurface labels. Hence the masking of unwanted regions as well as the direct volume rendering of the desired regions of interest (ROI) can be implemented on the GPU which enables interactive frame rates even while the user changes the selection of the ROI.
Character Animation from 2D Pictures and 3D Motion Data

This paper presents a new method to animate photos of 2D characters using 3D motion capture data. Given a single image of a person or essentially human-like subject our method transfers the motion of a 3D skeleton onto the subject's 2D shape in image space, generating the impression of a realistic movement. We present robust solutions to reconstruct a projective camera model and a 3D model pose which matches best to the given 2D image. Depending on the reconstructed view, a 2D shape template is selected which enables the proper handling of occlusions. After fitting the template to the character in the input image, it is deformed as-rigid-as-possible by taking the projected 3D motion data into account. Unlike previous work our method thereby correctly handles projective shape distortion. It works for images from arbitrary views and requires only a small amount of user interaction. We present animations of a diverse set of human (and non-human) characters with different types of motions such as walking, jumping, or dancing.
Previous Year (2006)
